Connecting ROSRider to Raspberry PI
This wiring diagram illustrates direct I2C communication with the Raspberry PI.
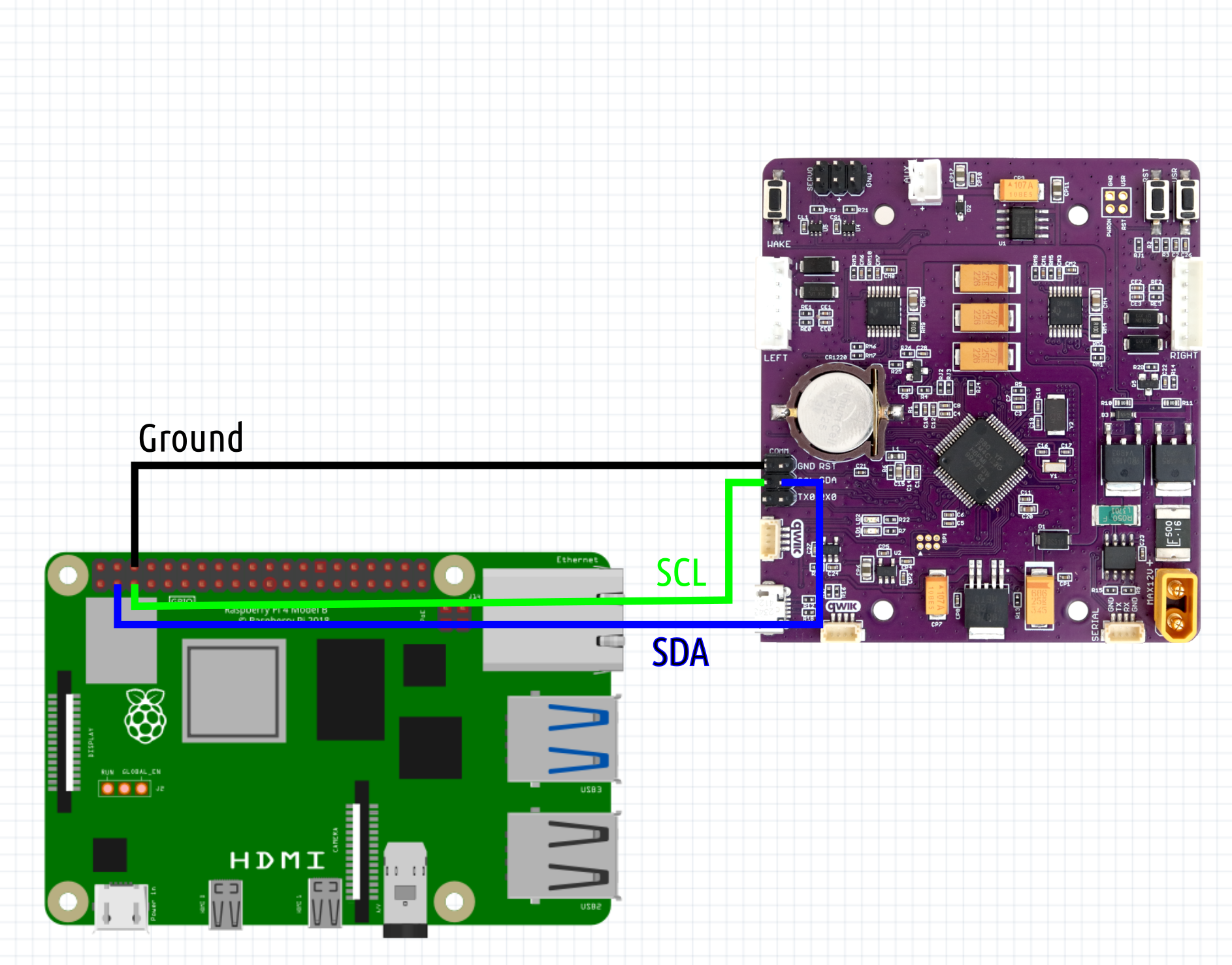
This image depicts the actual wiring configuration for direct I2C communication between the Raspberry Pi and ROSRider.
Connecting ROSRider to NVIDIA Jetson
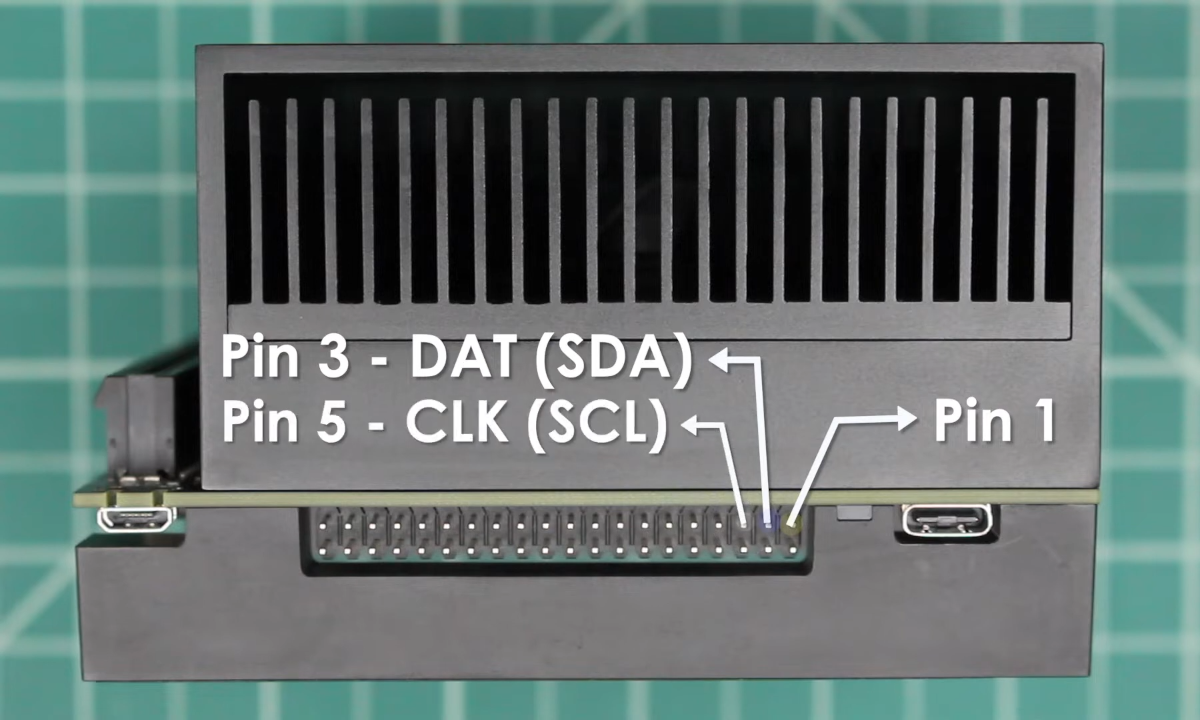
The NVIDIA Jetson has two I2C ports accessible via the header. To ensure proper communication with I2C devices, it’s crucial to configure the I2C voltage level. This is accomplished using a jumper (J514) on the board. To select 3.3V I2C, position the jumper accordingly.
To ensure proper I2C communication, verify that I2C is enabled at the kernel level and that your user account has the necessary permissions to access the I2C bus on the host computer.
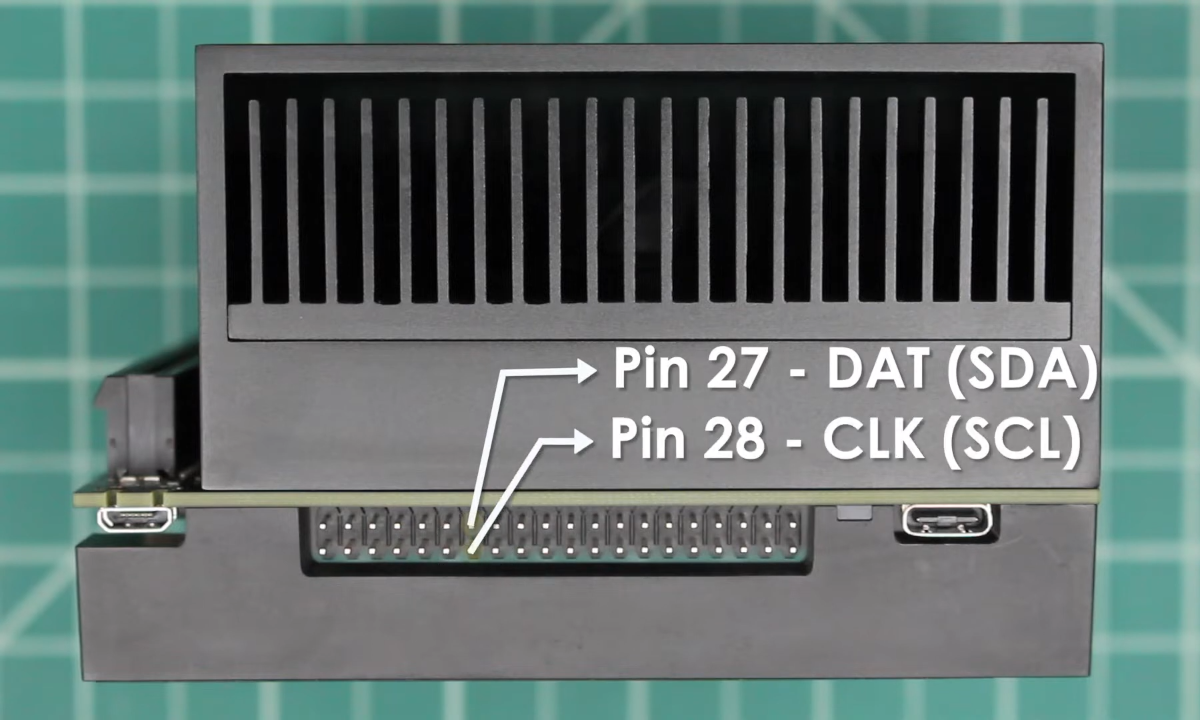
There are two I2C ports on the Jetson AGX:
Here is an excellent video on connecting I2C devices to Jetson: https://www.youtube.com/watch?v=7_H7tzcdBMU]. This video provides a comprehensive guide on the steps involved, from identifying I2C pins to configuring software and starting device usage.
Detecting I2C Devices
For troubleshooting purposes, you may want to detect I2C devices connected to your computer. To do this, you can use the i2cdetect command in the terminal.
Install the i2c-tools package to access I2C devices:
sudo apt install i2c-tools
Use the i2cdetect command to scan the I2C bus and identify connected devices:
sudo i2cdetect -y -r 1

This command will display a table of I2C addresses. The default address of the ROSRider is 0x3c, and the default address of the ROS2RPI card is 0x20.
Note: If you only have a ROSRider connected directly, you should only see the address 0x3c.
Once you’ve confirmed the presence of the ROSRider on the I2C bus, you can proceed with installing the necessary drivers.
Next Chapter: ROS2 Drivers